


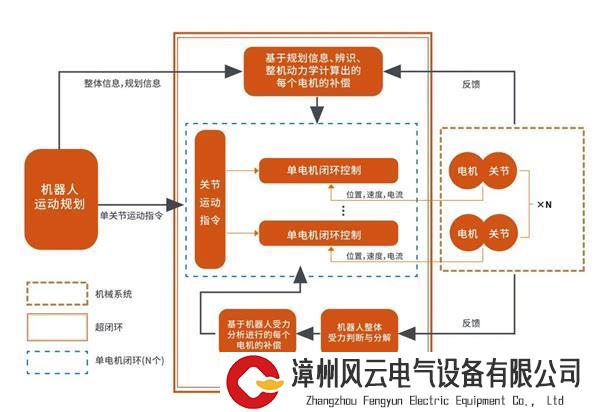
不论是人形机器人还是工业机器人,“机器人控制” 无非是通过协调各个关节的运动来实现机器人整体的运动目标。

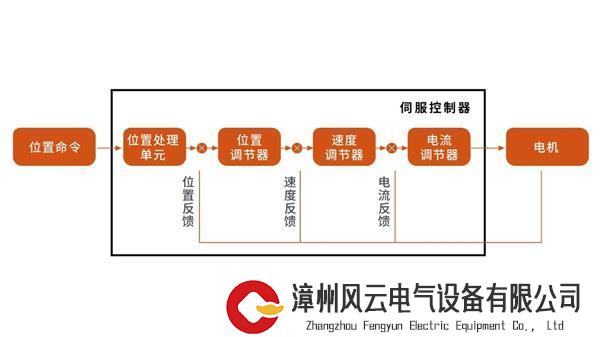
传统架构中,机器人控制分为两部分,一部分是关节的伺服控制,可能是个伺服电机,或是电液伺服执行器,它控制的是一个单一维度的运动;另一部分是整体控制,比如工业机器人领域的所谓运动控制器,它负责为每一个关节下达运动指令,以保证整个手臂的运动效果符合预期。

图一:早期工业机器人或多轴工业设备控制架构





在SCIMC架构下,依赖单芯片内高速无延迟的信息交互能力,我们在捷勃特C5A机器人实现了高达5KHz的全手臂闭环(以下称为“超闭环”或者“HyperRing”),在闭环过程中融合了所有关节多种传感器的信息,同时嵌入了整机的系统动力学和运动学算法进行综合计算,并以5KHz的刷新频率更新各个关节的出力,实现手臂全局范围内的力感知和行动约束。
基于此项技术,可以实现需要“手感”的柔顺装配,也可以实现空间自由度约束下的拖动示教。HyperRing的算法实现可以多种多样,我们目前实现的拖动中的空间约束,表现令人惊叹!

“擦桌子”式自由拖:
水平方向可以拖动,垂直方向保持高刚性


